स्टेनलेस स्टील की वेल्डिंग के लिए उच्च गुणवत्ता वाला चीनी एमआईजी वेल्डिंग रोबोट







रोबोट शरीर
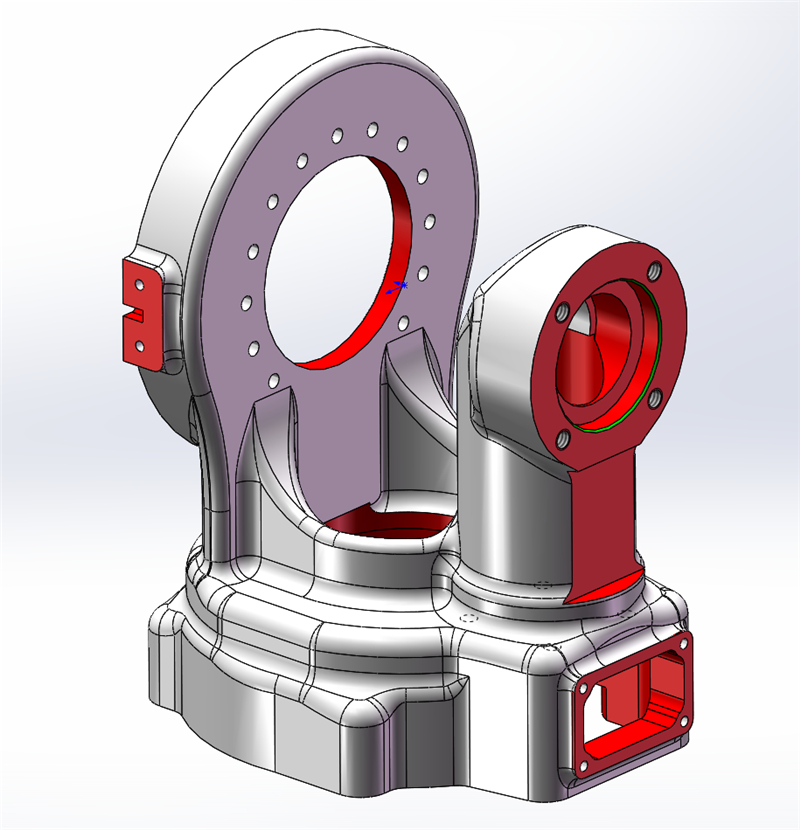
जेएचवाई रोबोट में मुख्य रूप से डाई-कास्टिंग प्रक्रिया और बॉडी के विस्तृत डिजाइन में बदलाव किए गए हैं। हमारी अनुसंधान एवं विकास टीम ने रोबोट बॉडी के डिजाइन में कई नवाचार किए हैं और दस से अधिक नए आविष्कार पेटेंट प्राप्त किए हैं।
उदाहरण के लिए, छठे अक्ष में उच्च परिशुद्धता वाला संचरण तंत्र विकसित किया गया है और सुदृढ़ीकरण छड़ें डिज़ाइन की गई हैं। साथ ही, छठे पहिये की आउटपुट डिस्क में गियर रहित डिज़ाइन का उपयोग किया गया है, जिससे रोबोट की सटीकता और स्थिरता में काफी सुधार हुआ है। यहां तक कि अगर वेल्डिंग टॉर्च कठिन परिस्थितियों में भी काम करे, तो भी यह स्थिरता बनाए रखता है और हिलता नहीं है। हमारे घरेलू ग्राहकों ने इस बात की पुष्टि की है।
रोबोट का शरीर डाई-कास्टिंग तकनीक से निर्मित होता है, जिससे हमारे रोबोट उच्च घनत्व वाले और हल्के होते हैं। अग्रभाग संकरा और लंबा हो सकता है, और ऊपरी भुजा और अग्रभाग का अनुपात स्वर्णिम अनुपात के करीब होता है, जिससे गति अधिक लचीली और तेज होती है।
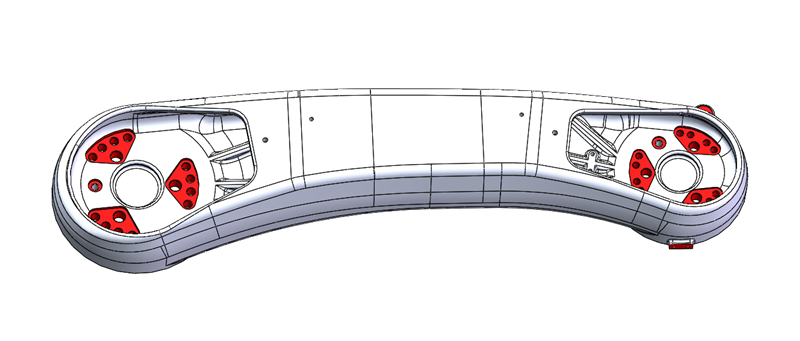
रूपरेखा डिजाइन
रोबोट के सीधे अग्रभाग का डिज़ाइन अधिक सरल और सुरुचिपूर्ण है। डिज़ाइन की दृष्टि से यह यूरोपीय बाज़ार की सौंदर्यबोध के अनुरूप है। रोबोट के शरीर के डिज़ाइन के लिए कई तकनीकी पेटेंट के लिए आवेदन किया गया है, जिससे नया रोबोट शरीर अधिक परिपूर्ण हो गया है।
तारों का शीर्ष ब्रांड
रोबोट के आंतरिक तार और टर्मिनल शीर्ष जापानी ब्रांडों द्वारा बनाए गए हैं: DYEDEN, TAIYO, साथ ही ABB और Fanuc भी।
टर्मिनल: इतालवी ब्रांड यिएर्मा।
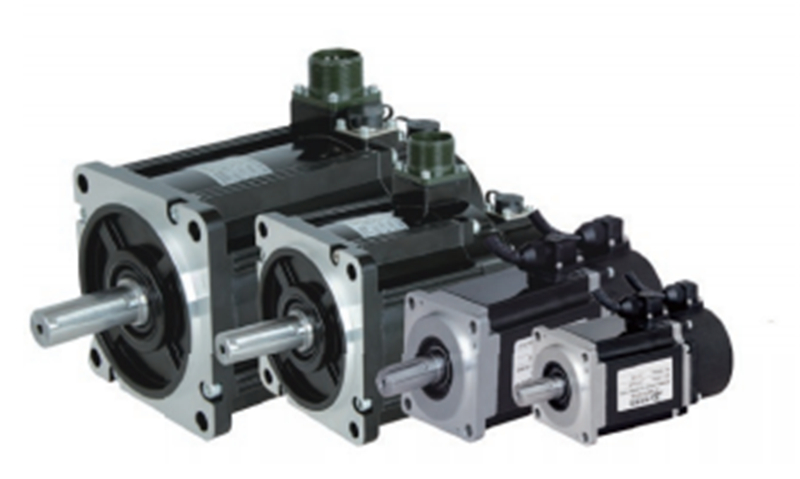
सर्वो मोटर/ड्राइवर/रिड्यूसर के अग्रणी ब्रांड
ये सभी रोबोट चीन के अग्रणी ब्रांडों का उपयोग करते हैं। अंतिम निर्णय लेने से पहले प्रत्येक ब्रांड का लंबे समय तक परीक्षण और जांच की गई है, ताकि यह सुनिश्चित किया जा सके कि ये ब्रांड हमारे रोबोटों के उपयोग के लिए उपयुक्त हैं और इनकी गुणवत्ता और प्रदर्शन स्थिर और विश्वसनीय हैं।
J1 और J2 अक्षों में 65 एनएम तक के टॉर्क वाले तीन विलक्षण शाफ्ट का डिज़ाइन अपनाया गया है, जिससे गियर का घिसाव कम होता है और रिड्यूसर का सेवा जीवन बढ़ जाता है। JHY रोबोट के J1 और J3 अक्ष रिड्यूसर वर्तमान में चीन में सबसे उन्नत कॉन्फ़िगरेशन हैं।
सर्वो मोटर के बारे में, अब हम रोबोटों के लिए अधिकतम 3 किलोवाट मोटर का उपयोग करते हैं।
1.8 मीटर और 2 मीटर के रोबोटों के लिए, पहले और दूसरे अक्ष के लिए आवश्यक ड्राइविंग बल अधिक होता है, और मोटर शक्ति की आवश्यकताएं भी अधिक होती हैं।
उच्च परिशुद्धता और बहु-विशिष्टता वाले मोटर हमारे रोबोट की अनुप्रयोगों संबंधी मांगों को पूरी तरह से पूरा कर सकते हैं।

3 वर्ष/7500 घंटे रखरखाव-मुक्त
इसका रखरखाव सरल है और ग्राहक इसे आसानी से चला सकते हैं।
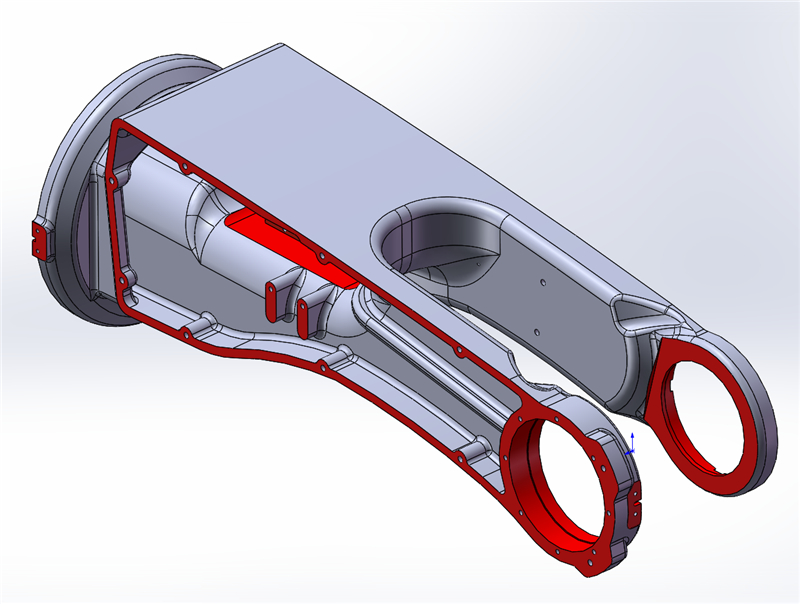
अन्य पेटेंट और डिज़ाइन
6-एक्सिस सेकेंडरी ट्रांसमिशन को दो बेल्ट कनेक्शन में परिवर्तित किया गया है, जिससे ट्रांसमिशन अनुपात में वृद्धि हुई है और 6-एक्सिस की अत्यधिक तीव्र और अशुद्ध गति की समस्या का समाधान हुआ है। छठे-एक्सिस आउटपुट डिस्क को गियर रहित डिज़ाइन किया गया है, जिसमें उच्च-सटीकता वाला ट्रांसमिशन तंत्र है, जो छठे एक्सिस की गति की सटीकता में सुधार करता है। वर्तमान में हमारे पास वेल्डिंग रोबोट से संबंधित 30 से अधिक पेटेंट हैं।
वीडियो
पैरामीटर
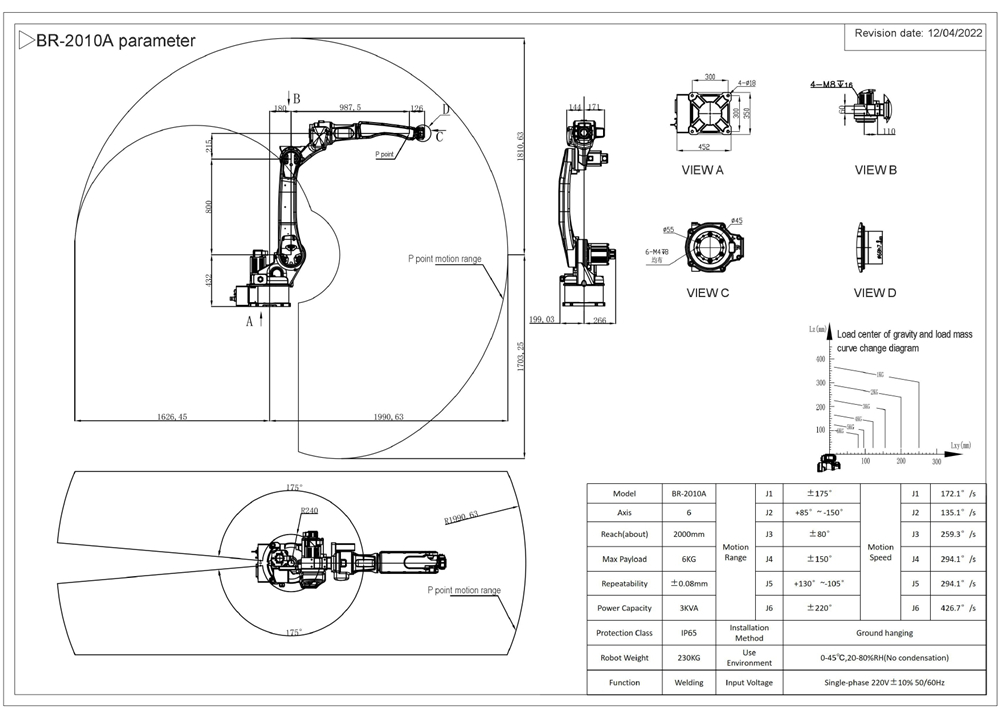
| नमूना | बीआर-2010ए | गति सीमा | J1 | ±175° | गति | J1 | 172.1 डिग्री/सेकंड |
| अक्ष | 6 | J2 | +85°~ -150° | J2 | 135.1 डिग्री/सेकंड | ||
| पहुँचना (लगभग) | 2000 मिमी | J3 | ±80° | J3 | 259.3 डिग्री/सेकंड | ||
| अधिकतम पेलोड | 6 किलो | J4 | ±150° | J4 | 294.1 डिग्री/सेकंड | ||
| repeatability | ±0.08 मिमी | J5 | +130°~-105° | J5 | 294.1 डिग्री/सेकंड | ||
| विद्युत क्षमता | 3केवीए | J6 | ±220° | J6 | 426.7 डिग्री/सेकंड | ||
| संरक्षण वर्ग | आईपी65 | इंस्टॉलेशन तरीका | जमीन से लटकने वाला | ||||
| रोबोट का वजन | 230 किलोग्राम | उपयोग वातावरण | 0-45℃, 20-80% सापेक्ष आर्द्रता (संघनन नहीं) | ||||
| समारोह | वेल्डिंग | इनपुट वोल्टेज | सिंगल-फेज 220V±10% 50/60Hz | ||||
उत्पाद श्रेणियाँ
-

6 एक्सिस लो स्पैटर एमआईजी वेल्डिंग रोबोट, रेंज 1800 मिमी
-

6 एक्सिस एमआईजी मैग वेल्डिंग रोबोट, रेंज 1500 मिमी के साथ...
-

फर्नीचर की वेल्डिंग के लिए उच्च गुणवत्ता वाले वेल्डिंग रोबोट का उपयोग किया जाता है।
-

JHY 6 अक्षीय रोबोट आर्म औद्योगिक स्वचालित आर्क मशीन...
-

कार्बन स्टील की वेल्डिंग के लिए 2000 मिमी की पहुंच वाला वेल्डिंग रोबोट...
-

स्टेनलेस स्टील वेल्डिंग के लिए 2000 मिमी स्पैन वाला एमआईजी वेल्डिंग रोबोट...